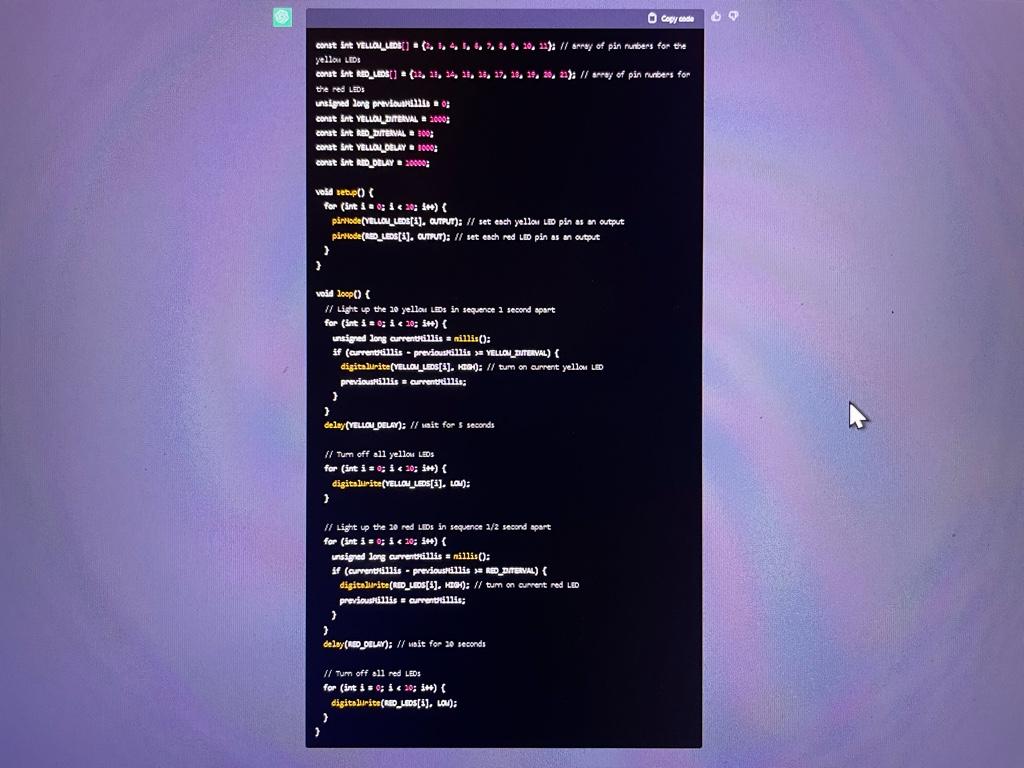
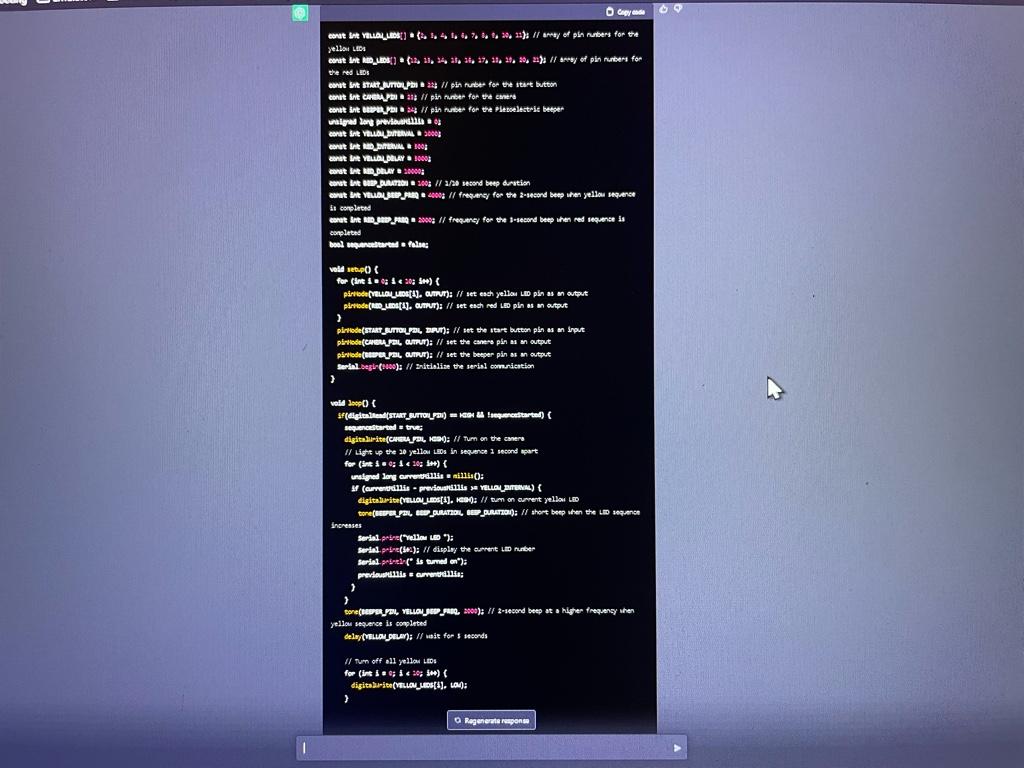
I'm working on a small automation project and I need to create an Arduino control program. I'm trying to just muscle my way through YouTube videos and other web resources, but I think I would benefit by explaining what I'm trying to do, and have someone with experience, coach me through the process.
I'm totally flexible in terms of how best to accommodate the teacher. I could meet in person or work on line via Zoom, Google Meet or MS teams. I can plan for a few jam packed 4 hr sessions or spread it out over shorter sessions over a longer time period. I'm not looking for any freebees either.
If an experienced person, thinks that I would be better off using some other language like Python or MicroPython, I'm open to those options too.
Oh, one more thing, I won't be a dick student!
I'm totally flexible in terms of how best to accommodate the teacher. I could meet in person or work on line via Zoom, Google Meet or MS teams. I can plan for a few jam packed 4 hr sessions or spread it out over shorter sessions over a longer time period. I'm not looking for any freebees either.
If an experienced person, thinks that I would be better off using some other language like Python or MicroPython, I'm open to those options too.
Oh, one more thing, I won't be a dick student!
") .
.